





钻爆法隧道智能建造研究现状与发展趋势(下)
5 钻爆法隧道智能建造管控平台
5.1 信息化智能管控平台技术体系
隧道与地下工程的建设过程中,面临着复杂的地质环境,导致灾害事故的发生具有突发性,其修建难度远高于地面工程。为了应对这些挑战,综合应用大数据、云计算、人工智能、BIM+CIM(城市信息模型)、虚拟现实、数字孪生等先进的技术,通过构建信息化智能管控平台,建立全方位感知、智能监测、预警应急和快速决策的体系,实现地下空间的智能韧性运维和可视化管理。基于物联网技术的智能管理平台能够自动获取检测数据、评估工程施工质量和安全性,反馈工程施工对策,实现对施工过程的实时反馈和动态管理,能极大的提高施工效率,保证工程建设的安全。因此,对于重大地下工程的建设而言,数字化问题变得尤为紧迫和重要。应不断加强数字化工作,以满足工程建设需求。
为了建设管控平台,需要通过程序实现施工、设计和业务的智能化管控。通过构建隧道物联网,利用多种传感器,可实现信息的采集、存储与综合决策。使用BIM等技术进行隧道的三维数字建模和数据存储,实现隧道的智能设计和施工管理,使得隧道施工过程中的各类数据能够以数字化形式进行存储。利用物联网技术融合隧道施工风险感知和预警技术,构建基于BIM的隧道建设信息化智慧系统,实现隧道施工信息的实时获取与监测预警,进一步提升隧道的智能化管理水平。通过集成多种信息化系统,实现对隧道建造的集中管控,有效保障了隧道工程建设的安全性和经济性。
5.2 信息化智能管控平台应用实例
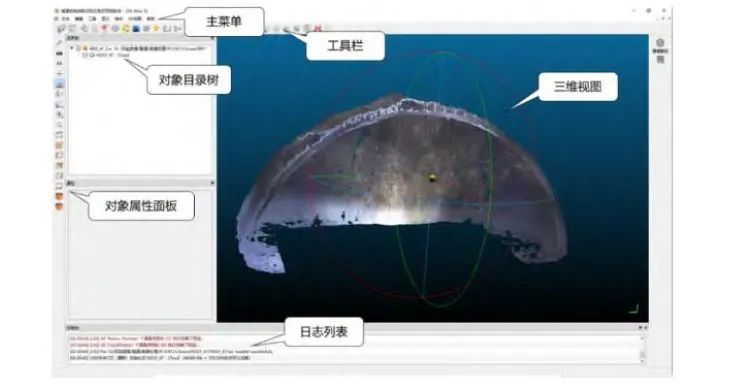
基于隧道建设全过程的实际需求,研发轻量化、可扩展、兼容强的隧道协同管理平台,该平台能够使信息在设计方、施工方、建设方和智能装备之间快速流通,解决了传统隧道建设过程中信息反馈滞后的难题。通过该平台,各参与单位能够共享数据和信息,实现协同工作和高效决策,进一步推动隧道智能建造的管理创新。该平台对隧道建设过程中设计、施工全过程和施工装备进行精细化的管理,使用人员可以通过互联网远程实时查看设备运行状况,通过三维可视化技术展现隧道施工过程,能够极大地提高施工管理效率和信息透明度,为隧道建设的顺利开展提供有力支持。
(1)朱合华等人,通过改进、融合隧道工程中高精度采集与分析方法及技术,形成一套针对岩体隧道的精细化采集、分析与服务系统。该系统能够高精度采集岩体和节理裂隙的几何信息,并对岩体表征信息进行三维重构,生成相应的岩体三维模型。同时,能够根据不同的数值分析方法,将数值分析所需要的相关数据,集成到依据工程信息自动生成的数字模型中,实现岩体隧道数字数值一体化。
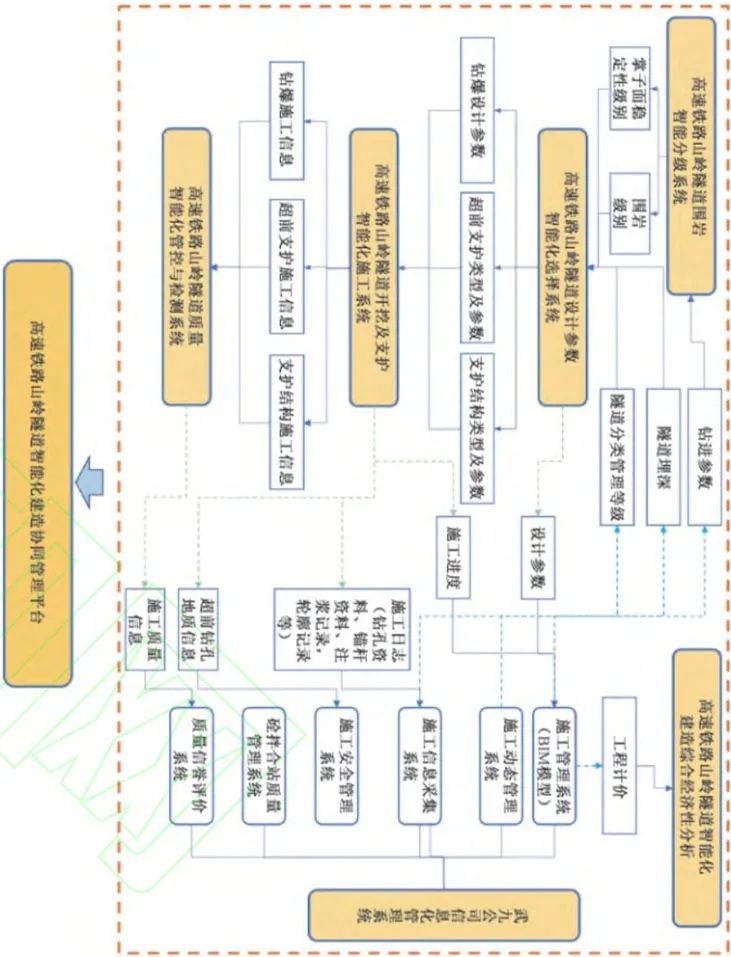
(2)王志坚以郑万高速铁路湖北段为例,通过深入分析隧道智能施工装备采集到的地质数据,建立了一套数据自动识别、数据清洗、数据封装与存储以及数据转换的方法,同时,针对隧道施工现场数据采集和传输的难题,研发了隧道施工作业数据采集和传输系统。以“武九公司信息化���理系统”为核心,通过研究该系统与隧道智能围岩分级、设计参数智能选择、开挖支护智能施工以及施工质量管控与检测等系统的整合方案,实现了系统的有效集成,提高了隧道施工效率,形成一套“高速铁路山岭隧道智能化建造协同管理平台”,如图14所示。该平台的构建和应用对推动我国隧道智能建造标准体系具有一定的参考价值。
(3)借助多种信息技术,成兰铁路打造了一套独具特色的信息化项目管理系统。通过建立铁路信息基础管理平台、施工现场视频监控系统(图15)、隧道人员进洞管理系统、拌和站生产监控系统、试验室数据采集系统(图16)、隧道围岩量测监控信息系统,构成信息化隧道建设管理系统。
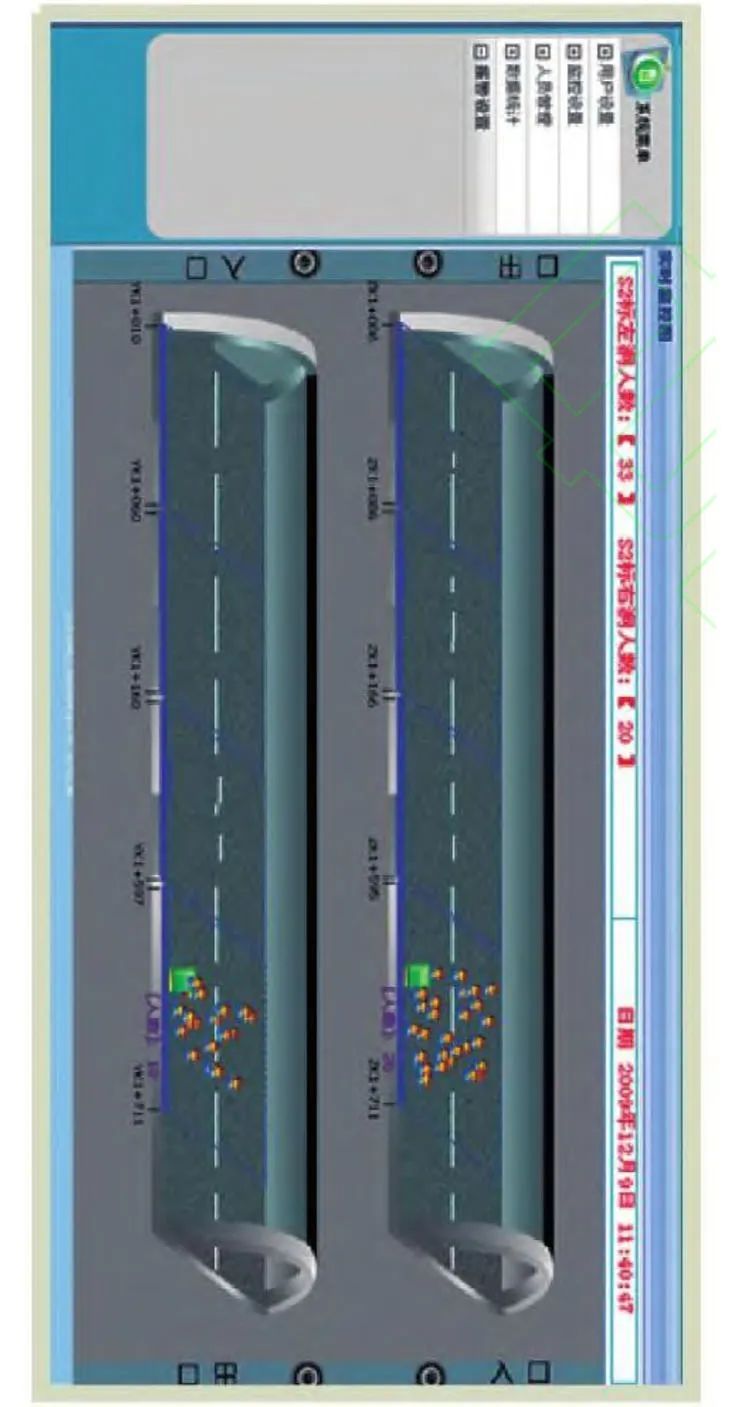
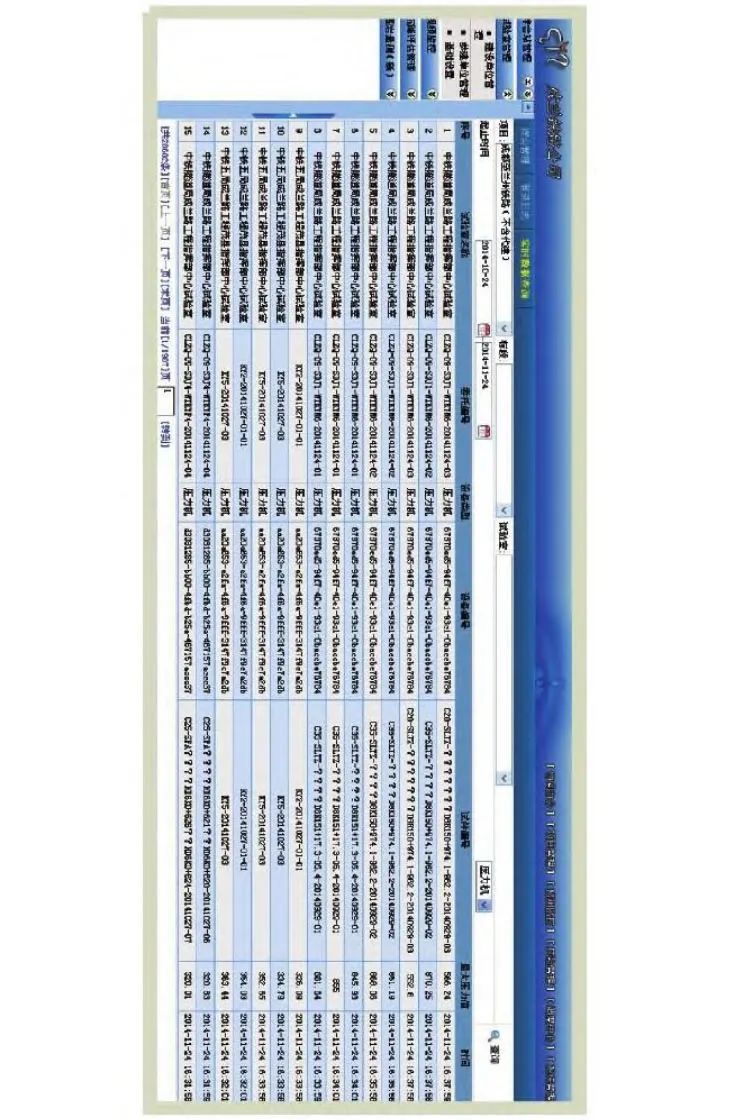
通过应用信息化隧道建设管理系统,及时地获取隧道施工各环节的信息,实时掌握隧道作业人员现场情况、隧道围岩量测数据以及试验室试验数据信息。信息化管理系统的建立为成兰铁路建设管理提供了全方位和全天候的保障,大幅提高了工程建设的质量和效率。
(4)朱学辉针对高风险隧道施工安全存在的诸多难点,以中川铁路九合二号高风险隧道施工安全管理为平台,应用信息技术和隧道模型仿真技术搭建高风险隧道施工安全预警管理系统,实现隧道建造的可视化展示和安全风险的预警管理。在实际应用中,通过综合利用地质勘探、超前地质预报和监控量测的地质与工程数据,结合隧道施工风险评估、施工现场异常状况识别和专家远程判识等,构建一套能够快速识别风险的参数化模型。实现了隧道建设过程及时发现问题并报警,提高信息共享程度,有效解决了以往工程建设过程中信息沟通不及时的问题,提高施工进度,避免资源浪费。
6 钻爆法隧道智能建造辅助工序装备
6.1 掌子面勘察测量机器人
岩体结构面精细化扫描与岩体结构智能分析在隧道及地下工程建造过程中占有重要地位,是实现隧道快速地质编录、围岩分级、超欠挖分析的重要保障。目前隧道掌子面岩体信息识别主要依靠现场工作人员,仍以人工识别为主,具有效率低、信息采集不全面、受人员主观因素影响大等劣势,难以保证岩体结构信息识别的准确性和可靠性。
针对上述问题,山东大学研发了隧道掌子面勘察测量机器人,其具有点云处理模块、地质编录与围岩分级模块、超欠挖分析模块,实现快速化地质编录与围岩分级、自动化超欠挖测量与智能化岩体质量评价。

掌子面勘察测量机器人软、硬件模块包括以下部分:
(1)履带式运载平台
研制履带式行进系统,配备驱动机构及悬架、履带式传动装置、减震装置和供电装置等,基于主动避障与智能行进系统,使装备不受复杂施工环境的影响,保证行进的灵活性与准确性,满足机体大角度爬坡、大载重行进、复杂路况越障、长时间续航的功能需求。实现隧道及地下工程施工现场复杂路况环境下安全平稳通行。
(2)运载平台控制模块
研制运载平台控制模块包含远程控制系统与数据传输系统。远程控制系统由工作站、调节面板、开关面板等构成;工作站作为控制信号处理的核心和数据处理的终端,能够实时接收、处理和分析远程传输的数据。受现场环境制约,远程通讯和数据传输采用中继方式进行。

(3)点云处理模块
研制点云处理模块,提供点云数据处理、编辑平台和环境,具有丰富多样的点云渲染方式,支持用户配置,支持多测站数据一键式定位定向、多测站点云拼接精度报告输出;该模块为后续地质编录、超欠挖分析、监控量测分析、危险块体识别等提供点云技术支持。
(4)地质编录与围岩分级模块
如图20所示,基于真彩三维激光点云数据,对隧道掌子面及边墙进行快速化地质编录,提取结构面迹长数据,计算结构面倾向和倾角。根据获取的结构面参数信息得到岩体的完整性程度指标再结合岩石的坚硬程度,实现围岩的初步分级。基于《工程岩体分级标准》(GB/T50218-2014),得到开挖面不同位置修正的岩体质量指标BQ值,进而得到当前掌子面的围岩级别。
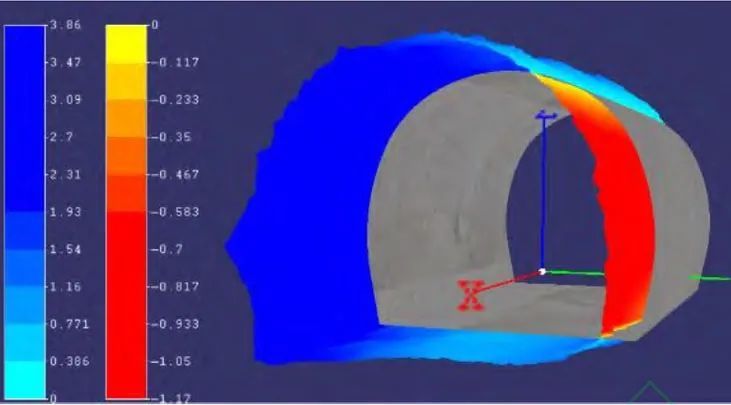
(5)超欠挖分析模块
基于隧道掌子面岩体结构信息的采集与分析,建立隧道开挖轮廓识别与超欠挖快速计算分析方法,研发自动超欠挖分析软件,实现隧道超欠挖分析。通过点云模型和设计模型进行超欠挖分析,计算出超挖方量、欠挖方量、超欠挖模型对比以及最大超挖切片、最大欠挖方量等结果,可以查看开挖面任意位置超欠挖具体值,并输出超欠挖分析报告。
工程应用:滨莱高速乐疃隧道,最大开挖跨度超过21米,是一条超大跨度、超大断面的高速公路隧道,隧道建设过程中穿越隧址区,巨石垮塌灾害风险极高,所研发的隧道掌子面勘察测量机器人在乐疃隧道进行应用,实现了常规环境下地质编录工作的无人化、自动化,为隧道安全施工提供了技术支撑。

6.2 掌子面围岩坍塌预警机器人
我国山区公路地形复杂、地质条件极其恶劣,隧道施工过程中可能出现多种灾害事故。其中掌子面坍塌是隧道施工过程中最常见的风险事件之一,同时其发生往往具有不确定性,致使掌子面坍塌风险管理面临极大的难题。目前,针对隧道与地下工程垮塌灾害的监测手段和思路,一般以安装高精度的应力、位移或振动传感器,从而实现对岩土体变形、破裂、坍塌的动态识别。然而,原位的监测技术无论是在技术方面,还是在运营维护方面仍存在诸多的限制,相较而言,非接触式监测技术在高风险地区进行信息采集及监测具有明显的优势。
因此,针对上述问题,山东大学开展了基于影像及振动的掌子面围岩坍塌预警机器人的研究。
(1)基于数字影像的掌子面危险区域划分技术
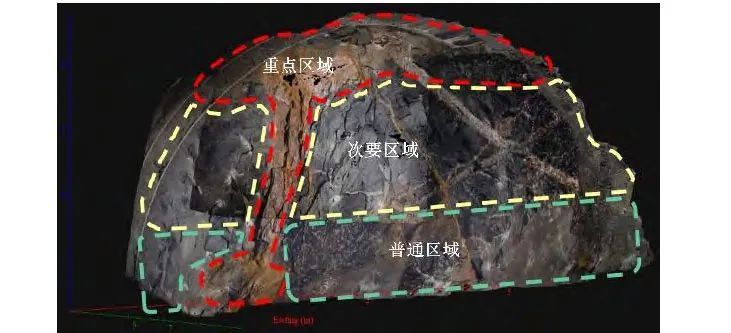
通过数码摄像系统对掌子面信息进行采集,基于现场采集的掌子面图像,构建掌子面图像数据库,建立深度学习网络模型对掌子面图像数据进行模型训练,当识别准确率达到设定值时,停止训练。将掌子面采集的图像导入到模型中,识别掌子面上结构面信息,随后基于块体分析理论,对潜在关键块体进行定位,从而划分掌子面区域危险等级。将掌子面划分为重点区域、次要区域、普通区域三个部分。其中,重点区域包括已识别出的潜在关键块体及附近区域,次要区域包括掌子面中部、拱腰及附近区域,普通区域包括掌子面高2m以下区域。如图23所示。
(2)基于数字影像的掌子面落石实时监测技术
基于数字影像分析实时监测裂缝、位移等崩塌前兆,实现监测过程中的掌子面落石预警。最小识别直径5cm块体,智能识别掌子面下方的人员及设备,防止因人员和设备进出引起的错报、漏报。搭载声光预警系统,监测到落石前兆时发出警报,及时通知掌子面人员设备撤离。
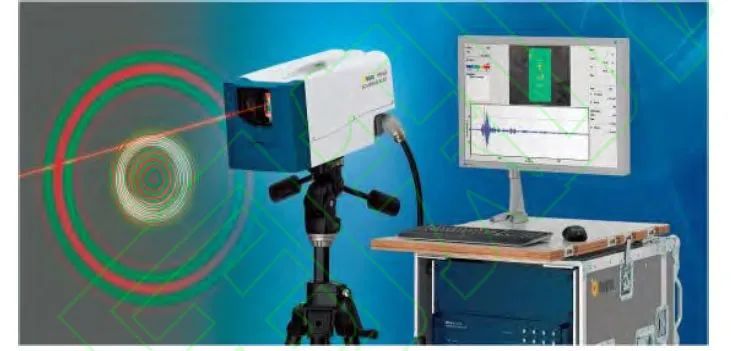
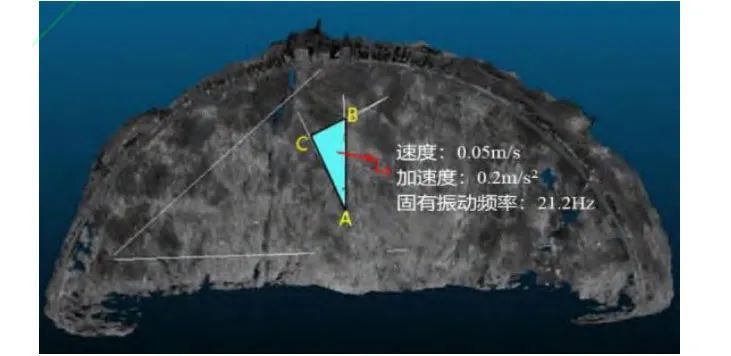
(3)基于激光测振的掌子面动力特征实时监测技术
基于激光测振技术,监测掌子面固有振动频率等参数,按照重点区域间隔10cm,次要区域间隔20cm,普通区域间隔50cm规划监测点。采用单次检测与多次检测结合的检测方式。对于单次检测,将掌子面固有振动频率较低的区域划分为潜在危险区域;对于多次检测,将掌子面固有振动频率有明显变化区域划分为潜在危险区域。
(4)掌子面稳定状态监测预警系统
融合数字影像及激光测振监测数据,通过数字影像分析,定位潜在关键块体,结合振动频率监测,确定岩体稳定状态。形成掌子面掉块垮塌灾害预警发布准则。实现掌子面整体坍塌前兆信息的监测,满足掌子面不稳定块体识别与失稳前兆的监测需求。
(5)机器人场景感知与自适应导航定位方法
针对隧道工程昏暗多尘、地形复杂等问题,提出了复杂隧道环境下机器人多源信息感知、地图实时重建以及自主导航定位技术体系,实现机器人精准定位与自动避障功能。
7 结语与展望
7.1 结语
钻爆法隧道智能建造管控平台与施工装备的研发应用为隧道建设快速化、少人化和智能化作业提供了新的手段。本文系统阐述了钻爆法隧道建造的发展历程以及智能化建造体系,其次,介绍了围岩智能评价与判别以及智能化爆破设计的相关进展,随后,介绍了智能化施工装备的发展过程及现状,同时,对智能化管控平台的技术体系和应用实例进行了阐述,最后,针对隧道建设过程中岩体结构面识别、围岩分级、超欠挖分析以及掌子面坍塌预警等难题,介绍了相应的研究进展,总结如下:
(1)钻爆法隧道施工具有灵活性和适应性强的优势,但是长期以来作业模式相对粗放,各施工装备间信息共享及互联性较弱,难以实现各工序间施工装备的高效互联和协调作业。因此,构建隧道建造智能管控平台体系,打破隧道建设过程中设计、施工、建设单位和施工装备之间的信息孤岛,是隧道智能化建造的根本保障。
(2)智能化围岩感知与爆破设计是隧道智能建造的重要依据。随着大数据、人工智能的兴起,围岩智能评价和智能化爆破设计得到了快速的发展,极大提高了隧道建造的自动化和智能化水平,为隧道智能化施工和动态设计提供了数据支撑。
(3)智能化施工装备是隧道智能建造的基础,针对钻爆法隧道智能建造的实际需求,形成以智能凿岩台车、智能锚注台车、智能拱架台车、智能湿喷台车以及智能衬砌台车为典型代表的隧道施工智能化装备。介绍了上述智能装备的发展历程以及自动化、智能化提升过程,表明我国智能化施工装备已经达到了国际领先水平,未来将向着多功能性和智能化发展,进一步提升设备的智能化水平。
(4)在钻爆法隧道智能建造辅助工序装备方面,以信息化、自动化技术为基础,深度融合物联网、大数据、5G通信等技术,实现快速化地质编录与围岩分级、自动化超欠挖测量、智能化岩体质量评价以及围岩稳定状态监测,提升隧道施工辅助工序的智能化水平。
7.2 展望
随着我国交通强国战略的持续推进,未来隧道建设规模仍然庞大,而且特长和超长隧道的建设规模前所未有,其难度也极为罕见。着眼于无人化辅助工序机器人和少人化高端施工装备的科技创新、装备研发、改进和应用实践等方面,以安全建造、高效建造为目的,推动机器人与高端装备混合作业模式,发挥数字物联网优势,最大程度实现少人化、无人化。具体包括以下方面:
(1)地上、地下环境存在巨大差异,机器人研发存在重大挑战。针对地下工程中存在的GPS拒止场景定位、低速基站传输、地下空间相对受限、干扰多等问题,协同多学科团队攻关,开展隧道不确定场景多模态动态感知和机器人-岩体耦合作业与自适应调控技术等科学问题的研究。
(2)以信息化、智能化施工为基础,结合物联网技术,研发智能机器人施工技术。针对智能机器人在长、大、深埋隧道中自主行进的难题,开展隧道复杂场景机器人定位行进与目标识别方法的研究,实现智能机器人在长、大、深埋隧道中行进自如;针对智能机器人自主控制的难题,开展机器人-岩体耦合作用模式与力学机制的研究,实现智能机器人在隧道施工作业复杂环境下的自动环境感知和自主施工控制;针对智能机器人自主作业的难题,开展基于机-岩耦合效应的作业质量控制技术,实现机器人在复杂环境下作业对象的精确识别;针对机器人研发应用难题,开展隧道多工序机器人装备研发及应用示范,力争实现机器人研发从“技术”到“装备”的突破。